Scanning probe microscope (SPM) is a powerful tool for interrogating phenomena at nanoscale, and imaging is probably the most widely used function of SPM. The basic idea of SPM imaging is to scan the same surface with an nano-meter size micro-machined cantilever probe in a ratstern pattern, while maintaining the probe-sample interaction force around a set-point value such that the probe will closely follow the sample topography profile during the scanning. The central challenge, particularly when it comes to live biological species, is to image at high-speed while keeping the probe-sample interaction force small.
Our approach is centered around the exploration of the following two ideas/concepts:
- Adaptive online minimization of the probe-sample interaction force
Unlike the standard SPM imaging modes (e.g., contact-mode and tapping-mode) where the set-point of probe-sample interaction force is fixed at a priori-chosen value, we proposed to online regulate the set-point of the probe-sample interaction force around the minimal value (needed to maintain the probe-sample interaction stable), through a gradient-based PID-type of adaptation scheme.
- Data-driven iterative feedforward control
Unlike other control techniques developed for SPM imaging, we proposed to integrate a data-driven iterative feedforward control to the feedback control loop for tracking the sample topography, where both the sample topography profile and the topography tracking error (i.e., the cantilever deflection fluctuation) measured on the previous scanline are used to approximate the desired sample topography profile to track on the current scanline, and the control input-output data from the previous scanline is used to construct and update the dynamics model online. This is achieved by using the modeling-free inversion-based iterative control (MIIC) technique developed by our group.
Implementation of the above two complementary ideas has resulted in the following two imaging modes:
- Adaptive contact-mode (ACM) imaging with near minimal force
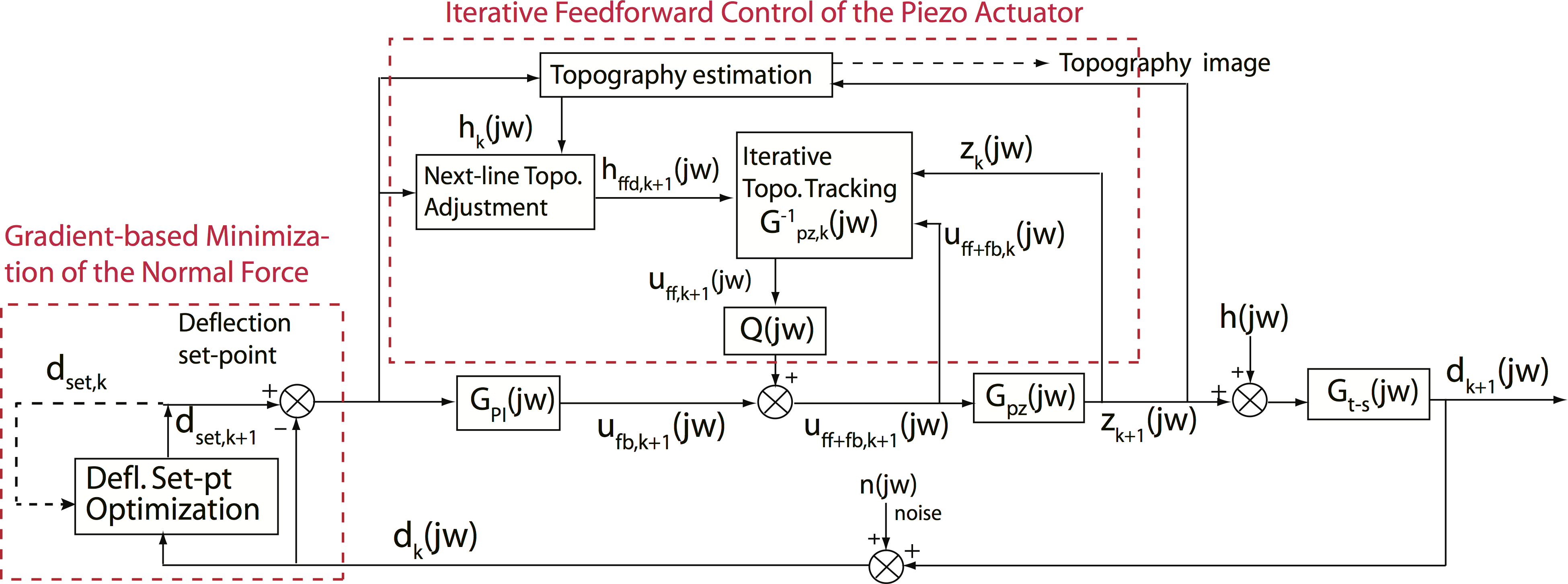
In the ACM imaging, the set-point of the probe-sample interaction force is updated line-by-line: Based on the values of the probe-sample interaction force measured on the previous line, the force set-point on the current line is tuned larger or smaller such that the predicted minimal probe-sample interaction force for stable probe-sample interaction can be maintained (see the block diagram below), and the tracking error on the previous scanline is exploited in the data-driven feedforward control such that a pre-actuation can be gained in the feedforward control—critical to avoid overshoot in the probe-sample interaction (i.e., deflection) around the sharp edges of the sample topography.
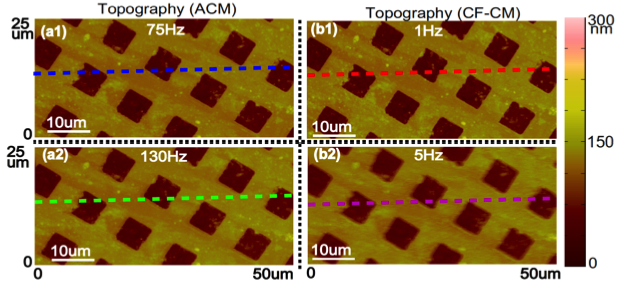
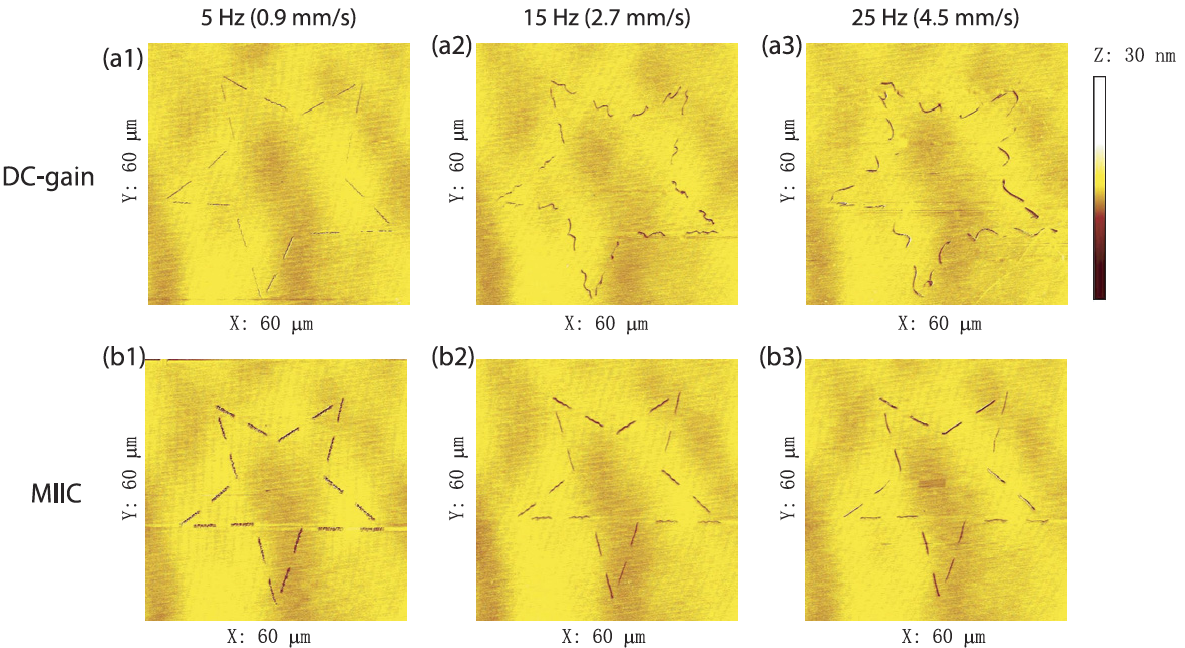
Below shows one example high-speed imaging results compared with that by the conventional contact-mode imaging at much lower speed. Note that the imaging size of over 50 μm is much larger than those reported in other high-speed SPM imaging developments.
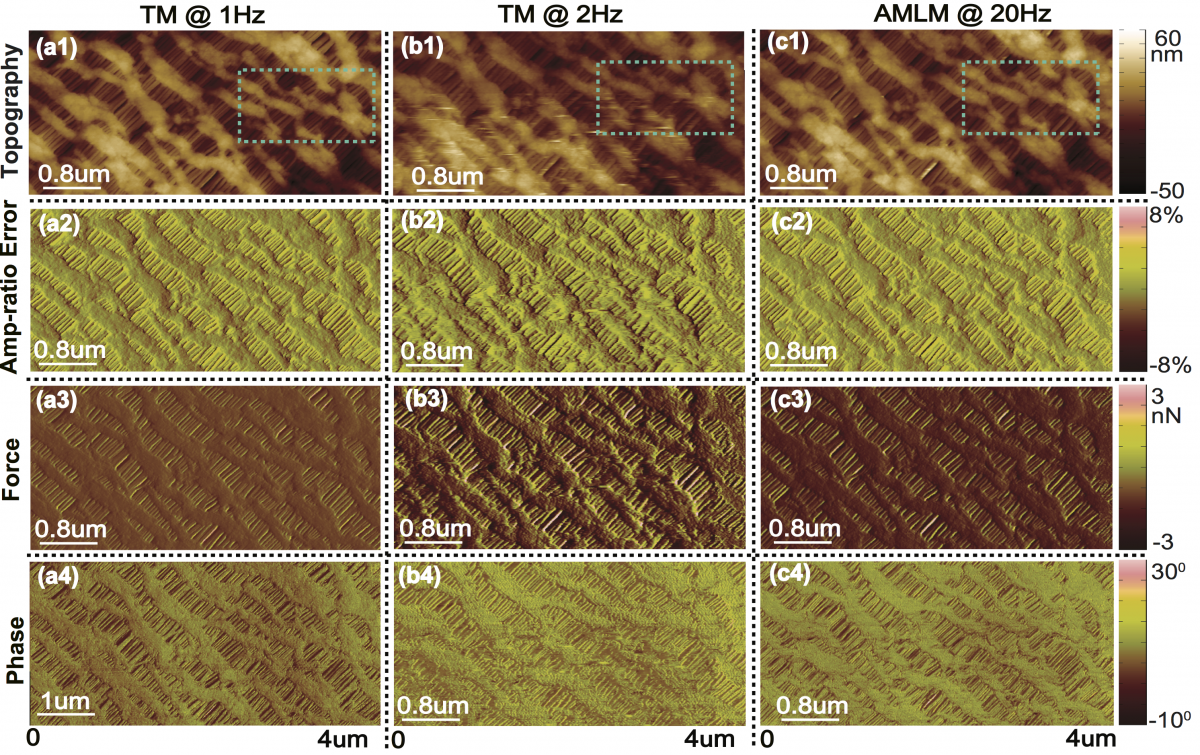
- Adaptive multi—loop-mode (AMLM) imaging: High-speed dynamic-mode imaging
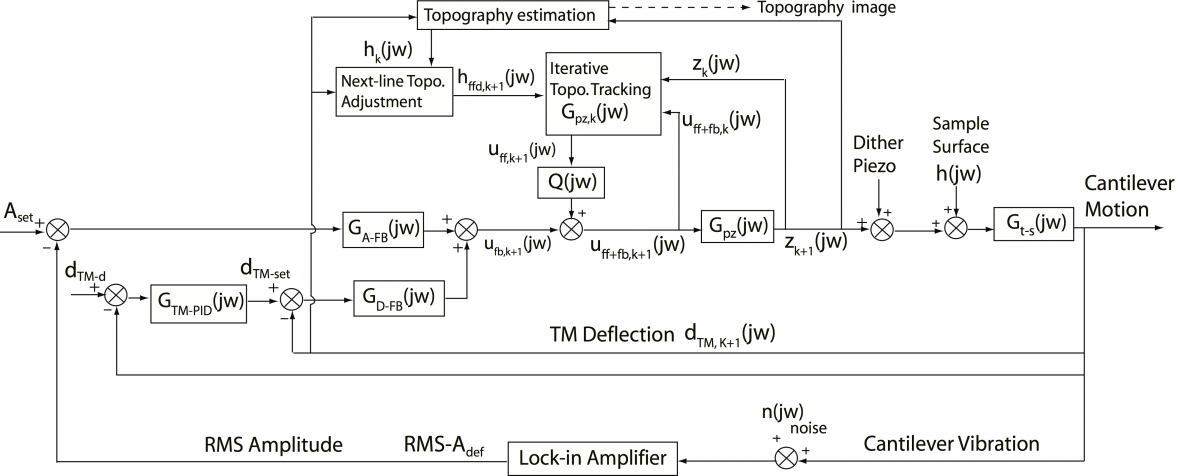
We have also extended the above ACM imaging technique to dynamic-mode imaging where the cantilever probe is oscillating (tapping) on the sample surface during the scanning. Key to the extension is the introduction of another feedback loop to regulate the mean value of the cantilever probe oscillation, and regulate the set-point of the mean cantilever deflection online adaptively, resulting in a double/trip feedback loop in a inner-outer loop structure (see Figure below).
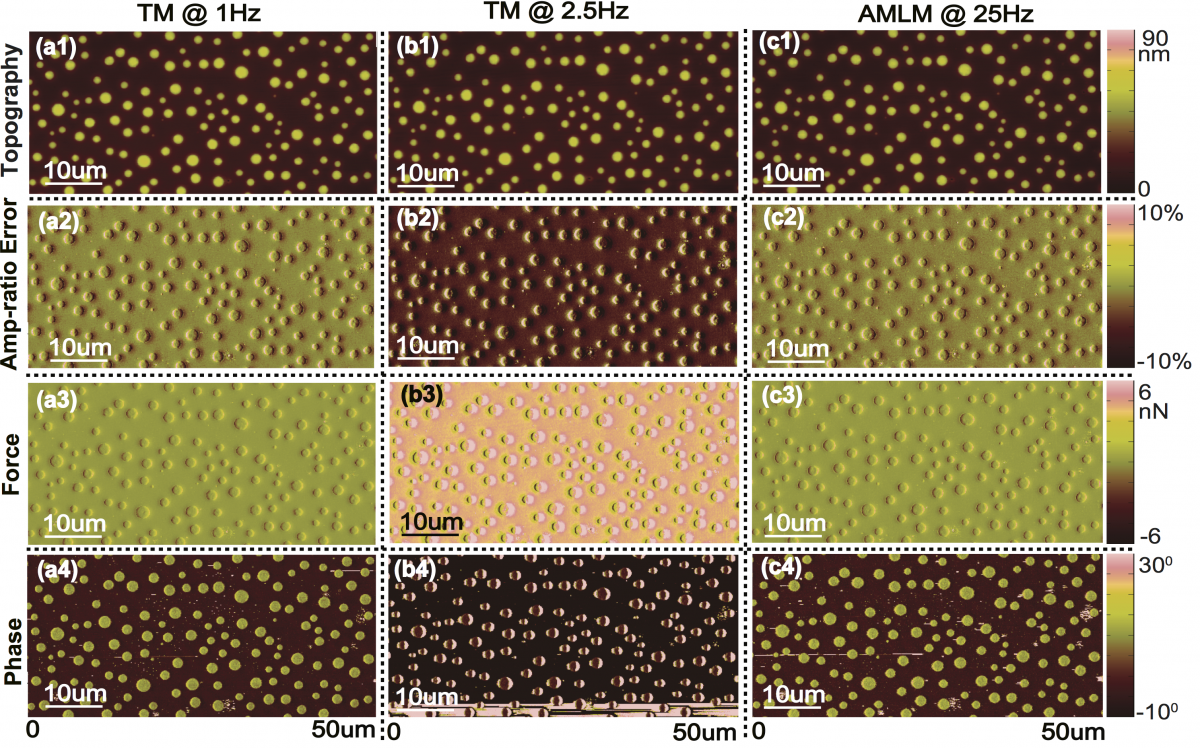
Below shows a few high-speed imaging results obtained by using the AMLM imaging technique. Also note that both large-size and small size imaging results are presented (by using the same AFM hardware system), and the imaging size of over 50 mu m is much larger than those reported in other high-speed SPM imaging developments.

Rapid broadband nanomechanical characterization of soft biological samples
Another important application of SPM is to measure the material properties, specifically, the mechanical properties of the sample at nanoscale. The basic concept is to apply a stimuli (e.g., force) to the sample, and measure the response of the sample (e.g., the indentation). Then the material properties can be extracted from the corresponding model of the probe-sample interaction, for example, the mechanical properties of the sample from the contact mechanics model of the probe-sample interaction. For nanomechanical property characterization, the main challenge is to accurately measure the frequency-dependent viscoelasticity (rheological properties) of soft samples over a large frequency range in short time, as needed in, for example, study the mechanical evolutions of live cell during dynamic biological activities such as the cancer cell reaction to anti-cancer drugs.
Our group has recently developed dynamics and control tools for rapid broadband nanomechanical characterization of soft samples, centering around two key ideas: (1). Accurately apply a broadband excitation force stimuli to rapidly excite the mechanical response of the sample; (2). Accurately measure the indentation generated. These two ideas are realized by using the modeling-free inversion-based iterative learning control techniques developed by our group.
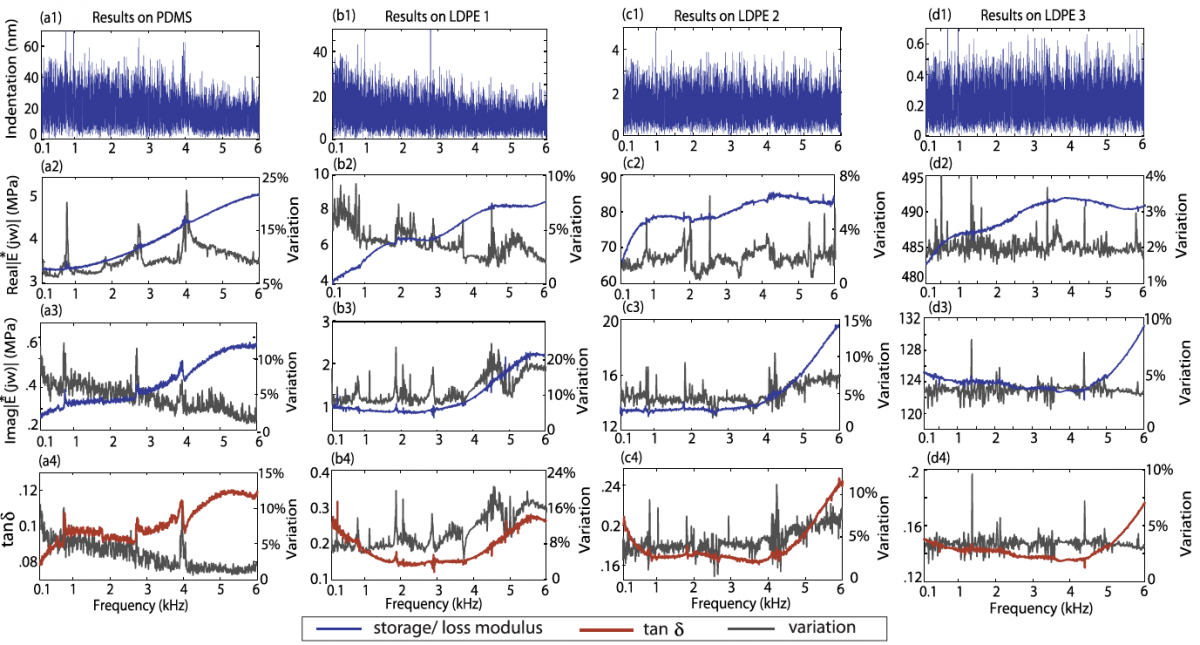
- Control-based Nanomechanical Measurement Protocol
The CNM protocol addressed the limitations of other existing nanomechanical methods in measuring the indentation over a large frequency range—by accounting for the acceleration effect of the probe-sample interaction force and the hydrodynamic force effect on the indentation measurement. The main idea is to ask the cantilever probe to accurately track the same desired excitation force profile on both the soft sample and a hard reference sample, then obtain the indentation from the difference of the displacement of the cantilever fixed-end on these two samples. Accurate tracking of the desired excitation force profile is achieved by using the MIIC technique.
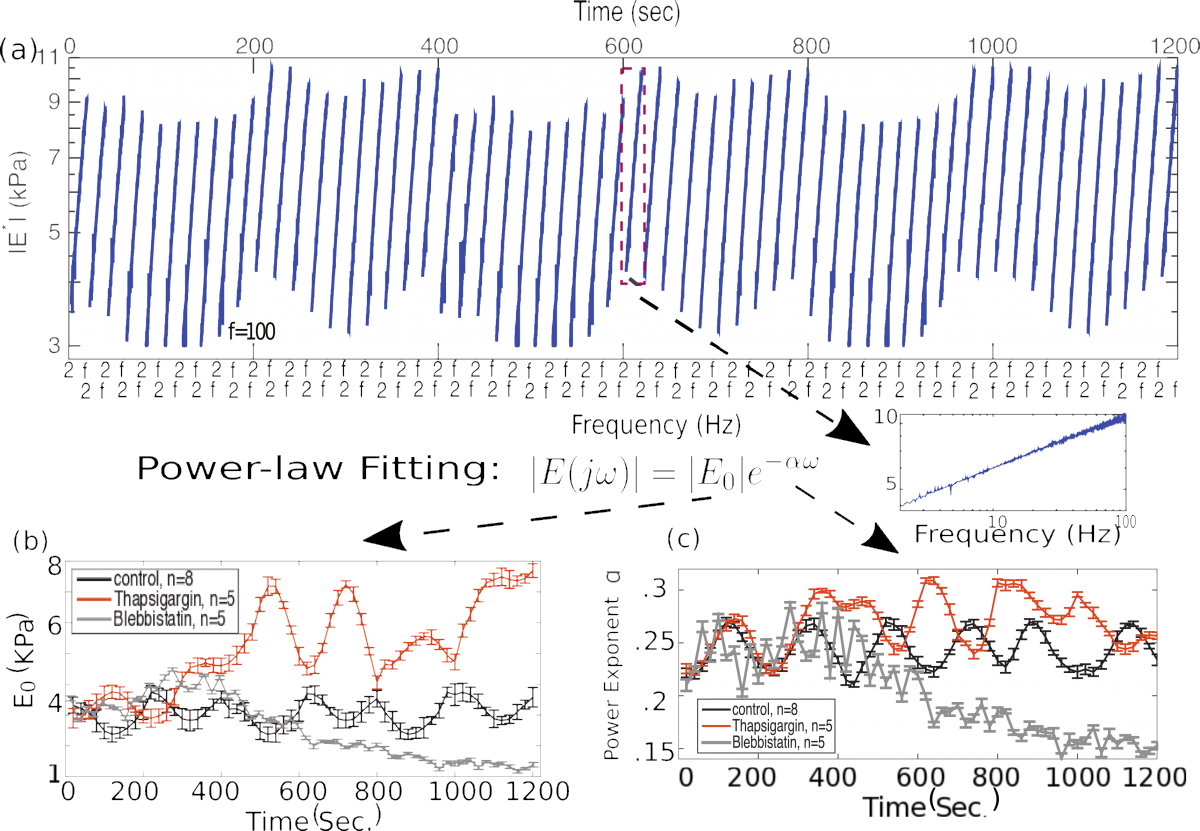
Below shows a few experiment results obtained by using the CNM protocol for both polymers and live cells. With the frequency range over a few kHz (for polymer) and a few hundred Hz (for live cells), the CNM protocol allows us to capture the nanomechanical characteristics quickly in a few to tens of seconds rather than tens of minutes previously.
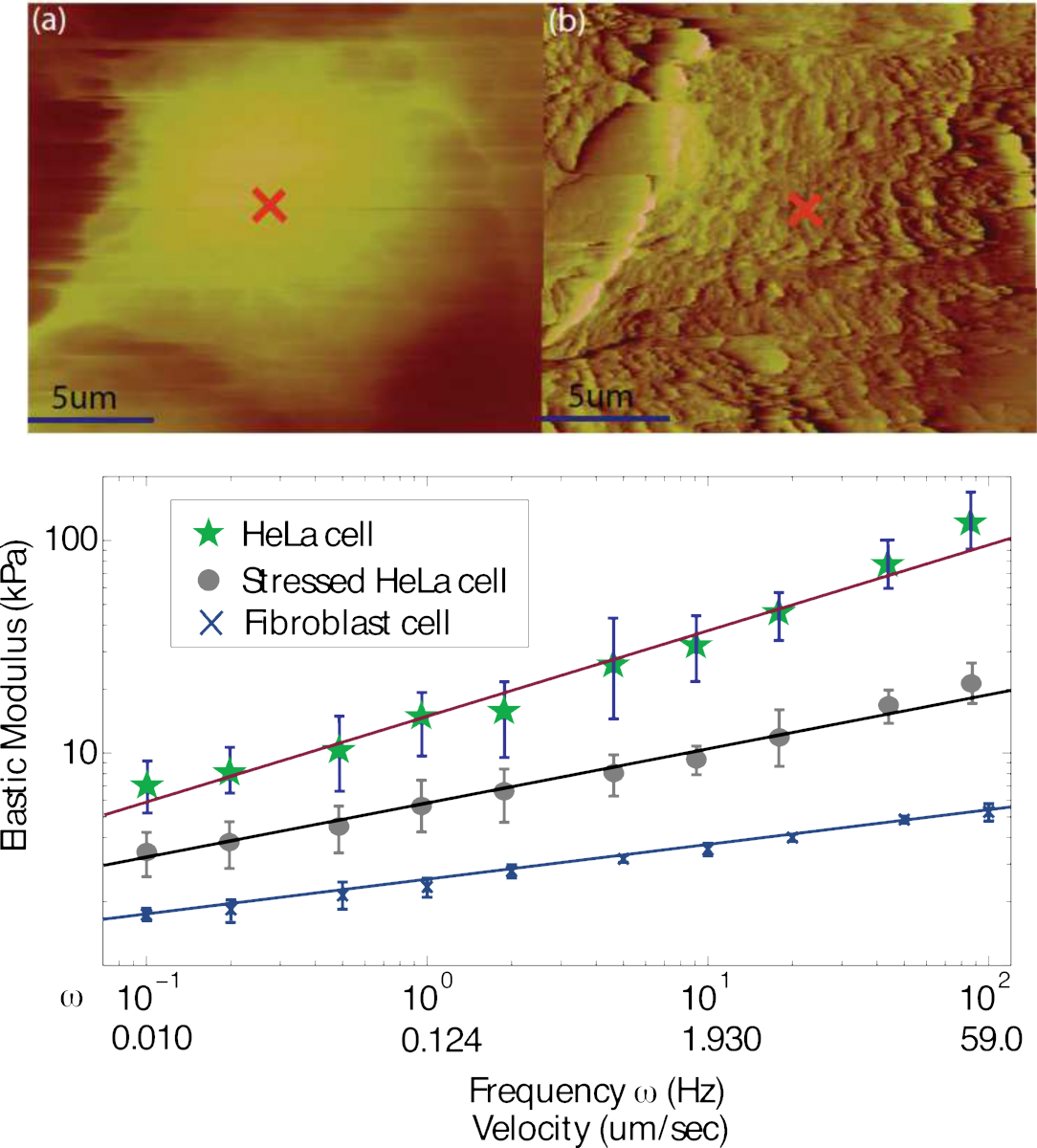
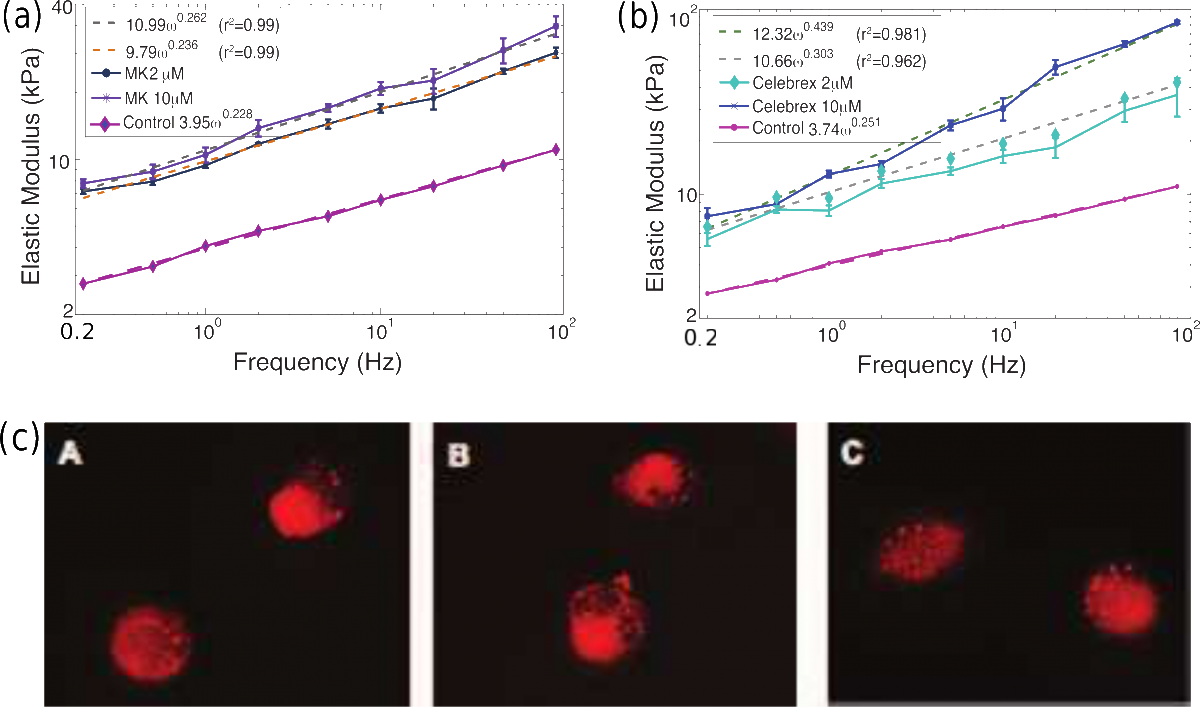
- Experimental nanomechanical study of live cells
Nanomechanical properties of live cells are an important aspect of biophysical/biochemical behaviors/activities of cells. The advantages of AFM lie in its ability to apply force of desired frequency profile and then measure the response (properties) at specific location, with nanoscale force and spatial resolutions.
Our group has applied the CNM protocol to investigate the nanomechanical properties of live cells undergoing a variety of dynamic evolutions, including the oscillations of viscoelasticity of PC-3 cells, the effect of eight different anticancer drugs on the rate-dependent elasticity of PC-3 cells, and the variations of rate-dependent elasticity of live human cells under cholesterol enrichment treatment.
{kind=link}
{kind=link}
High-speed probe-based nanomanufacturing (PBN)
SPM has also been exploited for fabricating patterns at nanoscale. Compared to other nanofabrication technologies (e.g., e-beam, ultra-violet lithography), SPM comes with much lower cost and much less complexity in (sample) preparation/operation. Although various approaches have been proposed, low-throughput remains as one of the main bottlenecks of PBN.
Our group’s approach to tackle this throughput issue is to develop and utilize advanced control techniques to dramatically increase the fabrication speed without loss of the fabrication range. Specially, we have developed a suite of iterative learning control techniques, with integration to induced ultrasonic oscillations of the probe to achieve high-speed direct fabrication on hard materials such as metals, and to focused laser beam on the probe to achieve non-contact high-quality fabrication on hard materials as well.
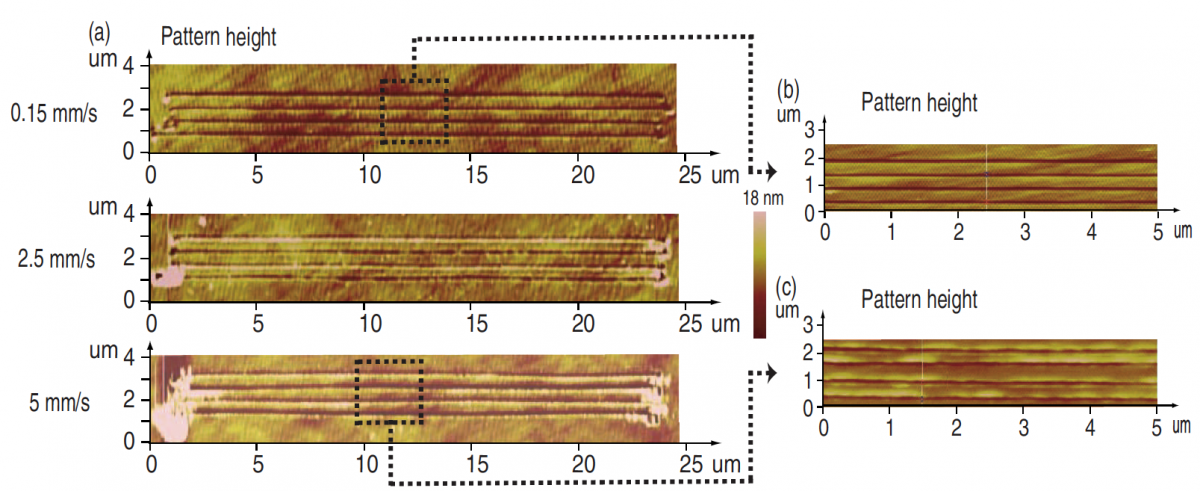
Below shows a few fabrication examples obtained by using the MIIC technique: (I). The “star” pattern fabricated at high-speed (line speed: 5 mm/sec.) over a relatively large sample area on gold substrate, (II) The line pattern fabricated with induced ultrasonic probe vibration at high-speed (line speed: ~4.5 mm/sec.) on hard tungsten substrate, (III) The line pattern fabricated with laser focused on the cantilever probe on aluminum substrate, and (IV). A video clip showing the fabrication of two Chinese Characters (“纳米“)at high-speed on a gold substrate, repeated seven times.
Nano-Vibration Elimination
High-performance SPM has a stringent requirement to the operation environment, and environmental-induced probe vibration directly results in distortions in the SPM image, the nano-patterns, or the manipulation obtained. Particularly, the acoustic-noise caused probe vibration has limited the use of SPM in critical applications such as the metrological quantification in cleanroom in semiconductor industry, whereas passive noise control cannot reduce the probe vibration to the required level, and prevents the combination of SPM with other instrument such as environmental control apparatus for biological investigations. The control challenge is that unlike the operation-induced probe vibrations (i.e., vibration induced by the instrument itself during the operation), the acoustic-caused probe vibration is largely random, broadband, and with complicated spectrum of no obvious decaying with frequency increase.
We have recently started to work on this problem of active noise control at nanoscale. Below are a few preliminary results that demonstrated the proof-of-concept.